Dispositifs de programmation
Plusieurs méthodes peuvent être utilisées pour la programmation des robots, toutes avec une interface Windows, installées sur PC industriel ou pupitre de commande.
Vr Tracking
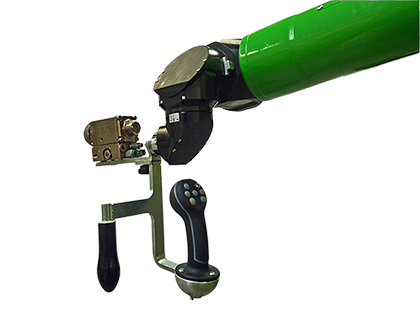
Après de nombreuses années d'expérience dans l'auto-programmation des robots de peinture, CMA a développé l'évolution du système d'auto-apprentissage. Au lieu de déplacer le robot comme cela se produit traditionnellement, un joystick spécial est utilisé, très léger et facile à manœuvrer, sur lequel le pistolet de pulvérisation lui-même est fixé.
Les trajectoires sont acquises par une série de capteurs et stockées pour créer le programme de peinture complet. Enfin, l'opérateur peint manuellement une première pièce, afin que les trajectoires puissent être répliquées par le robot CMA.
Joystick pour auto-apprentissage
Ces dispositifs de programmation permettent d’exécuter les cycles de peinture directement sur les pièces. Ces cycles sont ensuite mémorisés et codifiés à l’intérieur du dispositif de commande. Les programmes ainsi créés peuvent être rappelés ultérieurement au moyen de l’interface en ayant la possibilité de les modifier.
Ils peuvent aussi être utilisés pour l’acquisition des étapes dans la programmation PTP.
Les commandes principales sont :
- Ouverture d’un ou plusieurs pistolets
- Début-Arrêt de la mémorisation des programmes
- Mémorisation du programme
- Gestion des signaux extérieurs
- Gestion de la rotation de la pièce
- Acquisition des étapes en programmation PTP

Panneau mobile
Matériel
Système basé sur PC industriel sans ventilateur (sans hélice de ventilation) doté d’un processeur Intel Mobile N270 à 1,6 GHz.
L’interface utilisateur s’affiche sur un panneau mobile doté d’un processeur Intel PXA 270 à 416 MHz et d’un système d’exploitation Windows CE.
L’unité de programmation est dotée d’un écran d’affichage tactile 6,5 TFT en couleur de 8,6 pouces ayant une résolution de 640 x 480. Elle est de plus équipée d’un dispositif de sécurité « VACMA » à trois positions pour la programmation PTP, d’un bouton d’arrêt d’urgence et d’une clé pour désactiver l’écran tactile. Le joystick permet de déplacer tous les axes du robot et, si nécessaire, ceux extérieurs.
Un port USB est prévu pour l’enregistrement des programmes.
Unité de programmation
Un clavier peut aussi être utilisé, en plus de l’écran, pour la programmation. Celui-ci permet d’effectuer les opérations les plus fréquemment utilisées et servir de joystick analogique à trois degrés de liberté pour le mouvement manuel du robot.

Off Line
Le système de programmation hors ligne permet de créer des programmes de vernissage à l’aide d’un modèle 3D de la pièce-échantillon. Une simulation du cycle avec des effets graphiques qui permettent d’optimiser le processus s’affiche. Il est possible de configurer tous les paramètres directement sur l’ordinateur. Le programme est ensuite exporté sur le robot. L’environnement de développement est le même que celui utilisé sur le panneau mobile pour la programmation PTP. II est possible d’exporter le programme depuis le robot vers l’ordinateur pour les modifications, afin de ne pas devoir arrêter le robot.

