Dispositivos de programación
Para la programación de los robots se pueden utilizar diferentes métodos, todos con una interfaz de base Windows, instalados en ordenador industrial o una consola Teach Pendant.
Vr Tracking
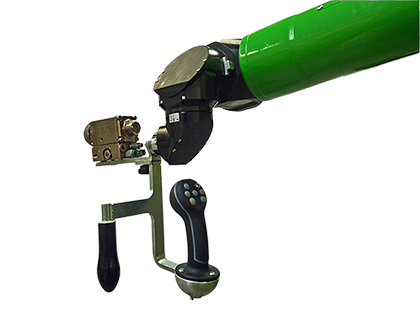
Tras muchos años de experiencia en la autoprogramación de robots de pintura, CMA ha desarrollado la evolución del sistema de autoaprendizaje. En lugar de mover el robot como se hace tradicionalmente, se utiliza un joystick especial, muy ligero y fácil de maniobrar, sobre el que se fija la propia pistola.
Las trayectorias son adquiridas por una serie de sensores y almacenadas para crear el programa de pintura completo. Finalmente, el operador pinta manualmente una pieza inicial, para que el robot CMA pueda replicar las trayectorias.
Joystick para autoaprendizaje
Con estos dispositivos de programación se puede efectuar directamente en las piezas los ciclos de pintura, los cuales posteriormente se memorizan y codifican en el interior del controlador. Los programas creados de esta manera pueden recuperarse más adelante mediante interfaz con la posibilidad de modificaciones.
Además, pueden utilizarse modificaciones para el aprendizaje de los puntos en la programación Punto a Punto.
Los mandos principales son:
- Apertura de una o varias pistolas
- Start-Stop Memorización de programas
- Memorización de programa
- Gestión de señales externas
- Gestión de la rotación de la pieza
- Aprendizaje de puntos en programación PTP

Panel móvil
Hardware
Sistema basado en ordenador industrial fanless (sin ventilador) dotado de procesador Intel Mobile N270 a 1,6 GHz.
La interfaz de usuario se muestra en un panel móvil dotado de un procesador Intel PXA 270 de 416 MHz y sistema operativo Windows CE.
La unidad de programación está dotada de monitor 6,5 TFT con pantalla táctil de color con unas dimensiones igual a 8,6 pulgadas resolución de 640x480; además, está dotada de dispositivo de seguridad de hombre muerto de tres posiciones para la programación punto a punto, de hongo de emergencia y de llave para deshabilitar la pantalla táctil. El joystick permite mover todos los ejes del robot y eventualmente los exteriores.
Para guardar los programas se ha previsto un puerto USB.
Unidad de programación
Para la programación, además del monitor, puede utilizarse también un teclado que realiza las funciones utilizadas de manera más habitual y un joystick analógico con tres grados de libertad para el movimiento manual del robot.

Off Line
El sistema de programación offline permite la creación de los programas de pintura utilizando un modelo 3D de la pieza de muestra, se visualiza una simulación del ciclo con efectos gráficos que permiten optimizar el proceso. Se pueden configurar todos los parámetros directamente en el ordenador, después el programa se exporta al robot. El ambiente de desarrollo es el mismo que se utiliza en el panel móvil para la programación PTP, se puede exportar el programa desde el robot al ordenador personal para efectuar las modificaciones, de manera que no es necesario detener el robot.

