Programmierungsvorrichtungen
Zur Programmierung der Roboter gibt es verschiedene Methoden, die alle eine Windows-Schnittstelle haben und in einem Industrie-PC oder Teach Pendant installiert sind.
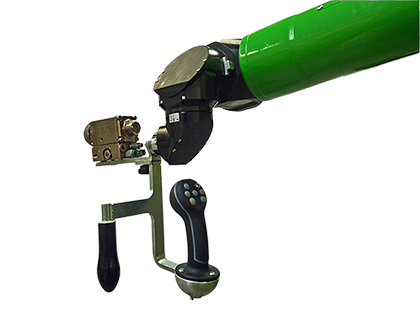
Vr Tracking
Nach langjähriger Erfahrung in der Selbstprogrammierung von Lackierrobotern hat CMA die Weiterentwicklung des selbstlernenden Systems entwickelt. Anstatt den Roboter wie üblich zu bewegen, wird ein spezieller Joystick verwendet, der sehr leicht und einfach zu manövrieren ist und an dem die Spritzpistole selbst befestigt ist.
Die Flugbahnen werden von einer Reihe von Sensoren erfasst und gespeichert, um das vollständige Lackierprogramm zu erstellen. Schließlich bemalt der Bediener manuell ein erstes Stück, damit die Flugbahnen vom CMA-Roboter nachgebildet werden können.
Joystick für Selbsterlernen
Anhand dieser Programmierungseinrichtungen können die Lackierungszyklen direkt auf den Werkstücken ausgeführt werden; die Zyklen werden dann gespeichert und im Steuergerät kodiert. Die erzeugten Programme können später über die Schnittstelle abgerufen und geändert werden.
Fernerhin können sie zur Erfassung der Punkte bei der PTP Programmierung verwendet werden.
Die wichtigsten Befehle:
- Öffnung einer oder mehrerer Pistolen
- Start-Stop Abspeicherung Programme
- Abspeicherung Programm
- Verwaltung externe Signale
- Verwaltung Rotation des Werkstücks
- Erfassung von Punkten bei Programmierung PTP

Mobil Panel
Hardware
Dieses System basiert auf einem industriellen Fanless-PC (ohne Lüfter), der mit einem Intel Prozessor N270 mit 1,6 GHz ausgestattet ist.
Die Benutzer-Schnittstelle wird auf der tragbaren, mit Intel Prozessor PXA 270 mit 416 MHz und Betriebssystem Windows CE ausgestatteten Bedientafel angezeigt.
Die Programmierungseinheit hat ein Farb-Display 6,5 TFT Touch Screen mit einer Größe von 8,6“ und einer Auflösung von 640x480 und ist mit einem Totmann-Sicherheitsschalter mit drei Positionen für die PTP Programmierung, einer Not-Aus Pilztaste und einem Touch Screen-Deaktivierungsschlüssel ausgestattet. Der Joystick bewegt sämtliche Roboterachsen und allfällig auch die externen Achsen.
Zum Sichern der Programme ist ein USB-Anschluss vorhanden.
Programmierungseinheit
Die Programmierung kann nicht nur über den Monitor, sondern auch über eine Tastatur für die am häufigsten verwendeten Funktionen sowie über einen analogen Joystick mit drei Freiheitsgraden zur manuellen Bewegung des Roboters vorgenommen werden.

Off Line
Das System der Offline-Programmierung gestattet das Erstellen der Lackierprogramme mit Hilfe eines 3D-Modells des Musterstücks. Dann wird eine Simulation des Zyklus mit grafischen Effekten eingeblendet, die die Optimierung des Verfahrens ermöglichen. Alle Parameter können direkt auf dem Computer eingegeben werden und das Programm wird danach auf den Roboter exportiert. Die Entwicklungsumgebung entspricht der auf dem Mobil Panel für die PTP-Programmierung verwendeten und das Programm kann für Änderungen vom Roboter auf den PC exportiert werden, um den Roboter nicht stoppen zu müssen.

